Travail et énergie cinétique.
I. Energie cinétique d'un solide
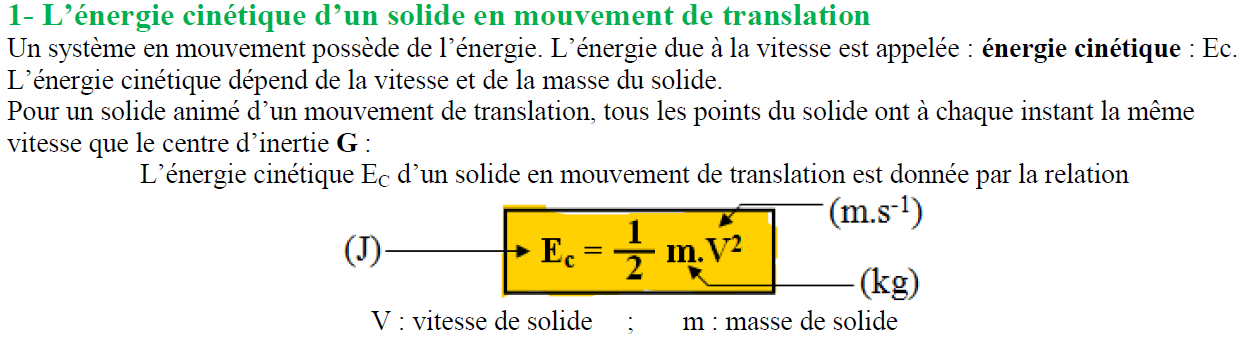
Un système en mouvement possède de l’énergie. L’énergie due à la vitesse est appelée : énergie cinétique : Ec.
L’énergie cinétique dépend de la vitesse et de la masse du solide.
Pour un solide animé d’un mouvement de translation, tous les points du solide ont à chaque instant la même vitesse que le centre d’inertie $\mathbf{G}$ :
L’énergie cinétique $E_C$ d’un solide en mouvement de translation est donnée par la relation
![]()
$$
\mathrm{V} \text { : vitesse de solide ; } \mathrm{m} \text { : masse de solide }
$$
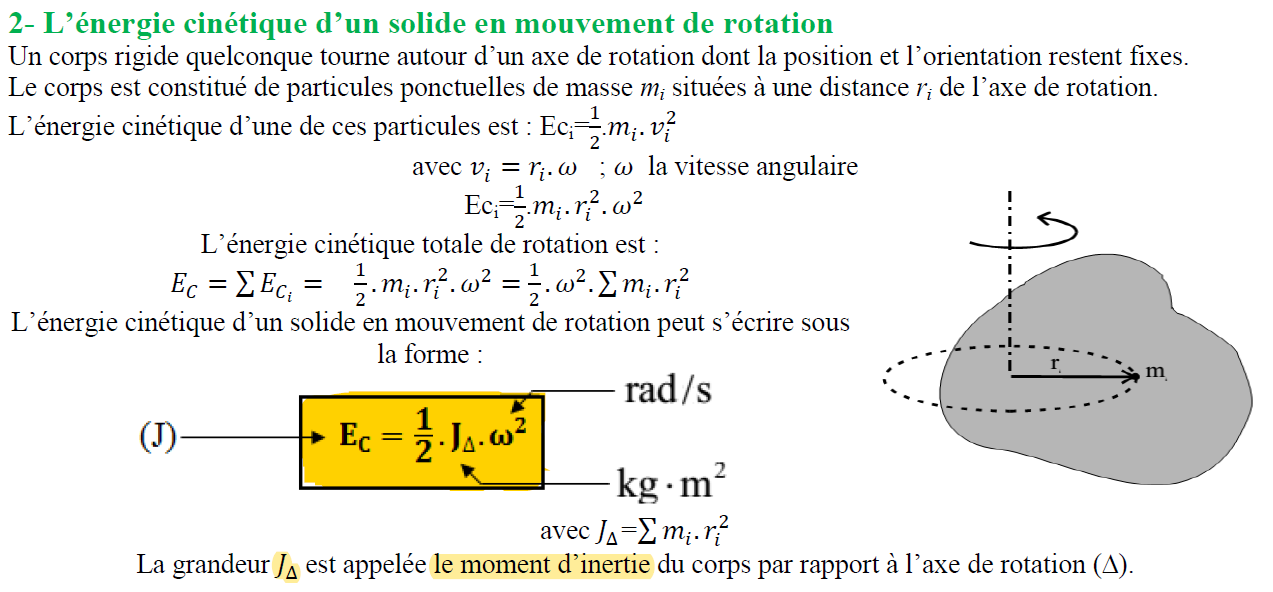
Un corps rigide quelconque tourne autour d’un axe de rotation dont la position et l’orientation restent fixe Le corps est constitué de particules ponctuelles de masse $m_i$ situées à une distance $r_i$ de l’axe de rotation.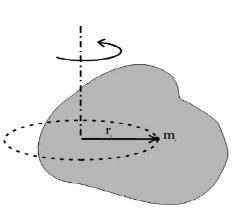 L’énergie cinétique d’une de ces particules est : $\mathrm{Ec}_{\mathrm{i}}=\frac{1}{2} \cdot m_i, v_i^2$
avec $v_i=r_i . \omega ; \omega$ la vitesse angulaire
L’énergie cinétique d’une de ces particules est : $\mathrm{Ec}_{\mathrm{i}}=\frac{1}{2} \cdot m_i, v_i^2$
avec $v_i=r_i . \omega ; \omega$ la vitesse angulaire
$$ \mathrm{Ec}_{\mathrm{i}}=\frac{1}{2} \cdot m_i \cdot r_i^2 \cdot \omega^2 $$
L’énergie cinétique totale de rotation est :
$$ E_C=\sum E_{C_i}=\frac{1}{2} \cdot m_i \cdot r_i^2 \cdot \omega^2=\frac{1}{2} \cdot \omega^2 \cdot \sum m_i \cdot r_i^2 $$
L’énergie cinétique d’un solide en mouvement de rotation peut s’écrire sous la forme:
$$ \operatorname{avec} J_{\Delta}=\sum m_i \cdot r_i^2 $$
$$ \text { La grandeur } J_{\Delta} \text { est appelée le moment d’inertie du corps par rapport à l’axe de rotation ( } \Delta \text { ). } $$
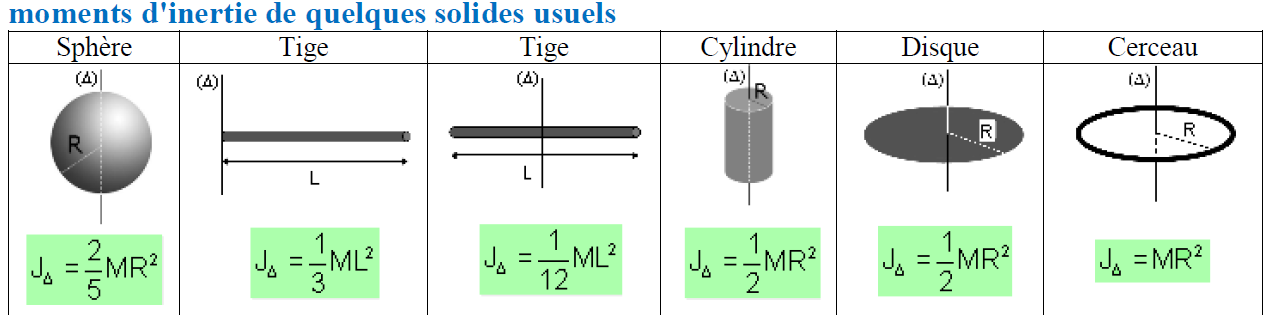
moments d’inertie de quelques solides usuels
| Sphère | Tige | Tige | Cylindre | Disque | Cerceau |
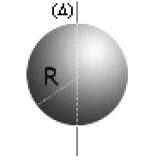 $J_{\Delta}=\frac{2}{5} M^2$
$J_{\Delta}=\frac{2}{5} M^2$ |
 $J_{\Delta}=\frac{1}{3} M L^2$
$J_{\Delta}=\frac{1}{3} M L^2$ |
$J_{\Delta}=\frac{1}{12} \mathrm{ML}^2$ |
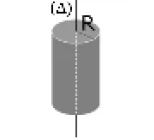 $J_{\Delta}=\frac{1}{2} M R^2$
$J_{\Delta}=\frac{1}{2} M R^2$ |
 $J_{\Delta}=\frac{1}{2} M R^2$
$J_{\Delta}=\frac{1}{2} M R^2$ |
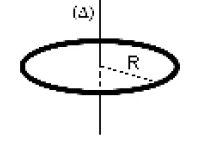 $J_{\Delta}=M R^2$ $J_{\Delta}=M R^2$ |