
MOUVEMENT DE ROTATION D’UN SOLIDE AUTOUR D’UN AXE FIXE
1.1 Abscisse angulaire
Rappel : Un corps solide est en mouvement circulaire autour d'un axe fixe si tous ses points décrivent des trajectoires circulaires centrées sur cet axe (seuls les points situés sur cet axe sont immobiles).
⋆ La position d'un point d'un corps solide en rotation autour d'un axe fixe $(\Delta)$, peut être repérée par son abscisse angulaire $\theta$. tel que :
On exprime $\theta$ dans le système international d'unités par : radian (rad).
⋆ l'abscisse curviligne est la longueur de l'arc $S = \overset{\frown}{AM}$, $S$ en mètre (m).
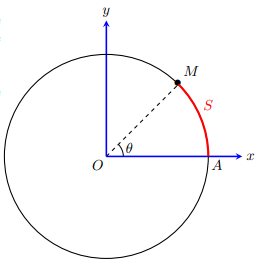
⋆ La relation entre l'abscisse curviligne et l'abscisse angulaire :
1.2 Vitesse angulaire $\dot{\theta}$
La vitesse angulaire $\omega$ est une grandeur qui représente le rapport d'un angle de rotation au temps.
⋆ La relation entre la vitesse angulaire $\dot{\theta}$ et la vitesse linéaire $V$ :
avec $V$ en (m.s$^{-1}$). tel que : $R$ est le rayon du cercle.
Pour déterminer la vitesse angulaire $\dot{\theta}_i$, on utilise la méthode d'encadrement
avec $t_{i-1}$ et $t_{i+1}$ des instants très rapprochés qui encadrent l'instant $t_i$.
1.3 Accélération angulaire
1.3.1 Définition
On définit l'accélération angulaire $\ddot{\theta}$ du mouvement d'un corps solide en rotation autour d'un axe fixe $(\Delta)$, à tout instant par la dérivée première par rapport au temps de la vitesse angulaire $\omega$ :
S'exprime dans le (SI) par (rad.s$^{-2}$)
1.3.2 Vecteur vitesse instantanée
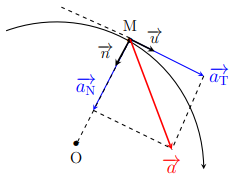
Dans la base de Frenet, le vecteur accélération s'écrit : $\vec{a} = \vec{a_N} + \vec{a_T}$ tel que :
- $\vec{a_T}$ : la composante tangentielle
$a_T = \frac{dv}{dt}$ - $\vec{a_N}$ : la composante normale
$a_N = \frac{v^2}{R}$
$\ddot{\theta}$ :
- $a_T = R \cdot \ddot{\theta}$ car $(v = R\dot{\theta})$
- $a_N = R \cdot \dot{\theta}^2$ car $(v = R \cdot \dot{\theta}$ donc $v^2 = R^2 \cdot \dot{\theta}^2)$
2.1 Moment d'une force (Rappel)
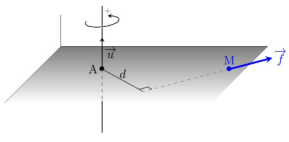
On appelle moment d'une force $\vec{f}$ par rapport à un axe de rotation $(\Delta)$ le produit de la norme $F$ de la force et de son bras de levier $d$, tel que :
⋆ L'unité dans le (SI) du moment d'une force est le «Newton mètre» (N.m)
Remarque : Une force parallèle à l'axe ou sa ligne d'action coupe l'axe de rotation a un moment nul par rapport à cet axe.
2.2 Vecteur d'accélération dans la base de Frenet
Dans un repère lié à la terre, la somme des moments des forces appliquées à un corps solide en rotation autour d'un axe fixe $(\Delta)$, est égale à chaque instant, au produit du moment d'inertie $J_{\Delta}$ et de l'accélération angulaire $\ddot{\theta}$ du corps solide à cet instant.
Avec : $J_{\Delta}$ : le moment d'inertie du corps en (kg.m$^2$) et $\ddot{\theta}$ : l'accélération angulaire en (rad.s$^{-2}$)
Application 1
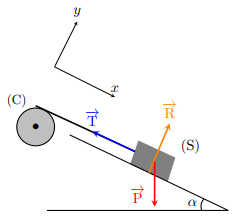
On considère la figure ci-contre constituée :
- D'un corps $(S)$ de masse $m_S = 0,25$ kg capable de glisser sans frottement sur un plan incliné d'un angle $\alpha = 30°$ par rapport à la ligne horizontale.
- D'un cylindre plein homogène $(C)$ de rayon $r = 8$ cm et de masse $m_C = 0,1$ kg capable de tourner sans frottement autour d'un axe horizontal et fixe $(\Delta)$.
- D'un fil inextensible de masse négligeable enroulé sur le cylindre $(C)$, son extrémité libre reliée au corps $(S)$, on considère que les frottements sont négligeables.
On libère le corps $S$ sans vitesse initiale et il glisse sur le plan incliné provoquant la rotation du cylindre. Exprimer l'accélération du corps $(S)$ en fonction de $g$, $\alpha$, $m_C$ et $m_S$, puis calculer sa valeur.
On donne : $g = 10$ N.kg$^{-1}$
Correction
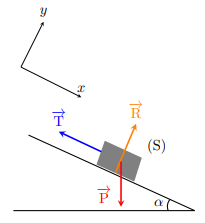
⋆ Étude du mouvement du corps $(S)$.
Le système étudié : { corps $(S)$ }.
les forces appliquées au corps :
- $\vec{P}$ : poids du corps.
- $\vec{T}$ : tension du fil.
- $\vec{R}$ : réaction du plan horizontal.
On applique, dans un référentiel galiléen, la 2ème loi de Newton :
$m_S \cdot \vec{a_G} = \vec{P} + \vec{T} + \vec{R}$
- Projection de l'équation sur l'axe $(O,x)$ : $m_S \cdot a_x = P_x + T_x + R_x$ ①
- Projection de l'équation sur l'axe $(O,y)$ : $m_S \cdot a_y = P_y + T_y + R_y$ ②
Puisque le mouvement se fait selon l'axe $(O,x)$ donc : $a_x = a_G$. ①
$\Rightarrow m_s \cdot a_G = m_s \cdot g \cdot \sin(\alpha) - T$
$T = m_s(g \cdot \sin(\alpha) - a_G)$
et aussi ②
$\Rightarrow R - m_s \cdot g \cdot \cos(\alpha) = 0$ donc : $R = m_s \cdot g \cdot \cos(\alpha)$
⋆ Étude du mouvement de cylindre $(C)$.
Le système étudié : { cylindre $(C)$ }.
les forces appliquées au cylindre :
- $\vec{P'}$ : poids de cylindre.
- $\vec{T'}$ : tension appliquée par le fil.
- $\vec{R'}$ : réaction de l'axe $(\Delta)$.
On applique la relation fondamentale de la dynamique dans ce cas au cylindre :
$M_{\Delta}(\vec{P'}) + M_{\Delta}(\vec{R'}) + M_{\Delta}(\vec{T'}) = J_{\Delta} \cdot \ddot{\theta}$
On a : $M_{\Delta}(\vec{P'}) = M_{\Delta}(\vec{R'}) = 0$ car la ligne d'action de $\vec{P'}$ et de $\vec{R'}$ rencontre l'axe de rotation $(\Delta)$.
Considérant le sens positif de rotation de cylindre et on écrit :
$M_{\Delta}(\vec{T'}) = +r \cdot T'$ c-à-d $r \cdot T' = J_{\Delta} \cdot \ddot{\theta}$ donc $T' = \frac{J_{\Delta} \cdot \ddot{\theta}}{r}$
Et puisque le fil est inextensible et ne glisse pas sur le cylindre donc : $T' = T$
D'après les deux expressions de $T$ et $T'$ on a :
$\frac{J_{\Delta} \cdot \ddot{\theta}}{r} = m_s \cdot g \cdot \sin(\alpha) - m_s \cdot a_G$
On a aussi $S = r \cdot \theta$ c-à-d $V = \dot{S} = r \cdot \dot{\theta}$
Donc : $a_G = \dot{V} = r \cdot \ddot{\theta}$ finalement : $\ddot{\theta} = \frac{a_G}{r}$
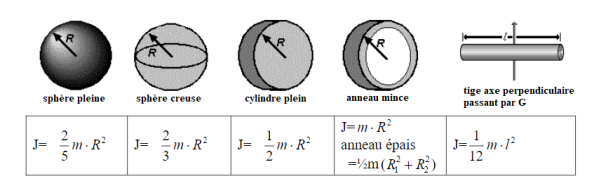
D'autre part : $J_{\Delta} = \frac{1}{2} m_c \cdot r^2$.
Finalement, on trouve :
application numérique : $a_G = 4,16$ m.s$^{-2}$
Application 2
Considérons une poulie $P$ homogène de rayon $r = 10$ cm et de masse $m_p = 0,2$ kg susceptible à tourner autour d'un axe de rotation, horizontal $(\Delta)$, et un corps $(S)$ de masse $m = 0,8$ kg relié à la poulie par un fil inextensible de masse négligeable passe par la gorge de la poulie sans glisser au cours du mouvement.
Moment du couple résistant dû au frottement appliqué à l'axe de la poulie : $M_c = -0,38$ N.m.
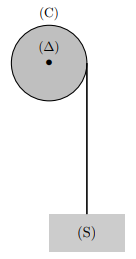
1. En appliquant la deuxième loi de newton et la relation fondamentale de la dynamique dans le cas de la rotation sur le système (Poulie + S + fil), Déterminer l'accélération du mouvement $a_G$. Calculer sa valeur.
Correction
⋆ Étude du mouvement de cylindre $(C)$.
Le système étudié : { cylindre $(C)$ }.
les forces appliquées au cylindre :
- $\vec{P'}$ : poids de cylindre.
- $\vec{T'}$ : tension appliquée par le fil.
- $\vec{R'}$ : réaction de l'axe $(\Delta)$.
- $M_c$ : couple de résistance.
On applique la relation fondamentale de la dynamique dans ce cas au cylindre :
$M_c + M_{\Delta}(\vec{P'}) + M_{\Delta}(\vec{R'}) + M_{\Delta}(\vec{T'}) = J_{\Delta} \cdot \ddot{\theta}$
On a : $M_{\Delta}(\vec{P'}) = M_{\Delta}(\vec{R'}) = 0$ car la ligne d'action de $\vec{P'}$ et de $\vec{R'}$ rencontre l'axe de rotation $(\Delta)$.
Considérant le sens positif de rotation de cylindre et on écrit :
$M_{\Delta}(\vec{T'}) = +r \cdot T'$ c-à-d $M_c + r \cdot T' = J_{\Delta} \cdot \ddot{\theta}$
Donc $T' = \frac{J_{\Delta} \cdot \ddot{\theta} - M_c}{r}$
D'après les deux expressions de $T$ et $T'$ on a :
$\frac{J_{\Delta} \cdot \ddot{\theta}}{r} = m_s \cdot g \cdot \sin(\alpha) - m_s \cdot a_G$
On a aussi $S = r \cdot \theta$ c-à-d $V = \dot{S} = r \cdot \dot{\theta}$
Donc : $a_G = \dot{V} = r \cdot \ddot{\theta}$ finalement : $\ddot{\theta} = \frac{a_G}{r}$
D'autre part : $J_{\Delta} = \frac{1}{2} m_c \cdot r^2$.
Finalement : $T' = \frac{m_p \cdot a}{2} - \frac{M_c}{r}$
⋆ Étude du mouvement du corps $(S)$.
Le système étudié : { corps $(S)$ }.
les forces appliquées au corps :
- $\vec{P}$ : poids du corps.
- $\vec{T}$ : tension du fil.
On applique, dans un référentiel galiléen, la 2ème loi de Newton :
$m_S \cdot \vec{a_G} = \vec{P} + \vec{T}$
Projection de l'équation sur l'axe $(O,z)$ :
$m_S \cdot a_z = P_z + T_z$ ①
Donc : $m_s \cdot a = m_s \cdot g - T \Rightarrow T = m_s \cdot g - m_s \cdot a$
Et puisque le fil est inextensible et ne glisse pas sur le cylindre donc : $T' = T$
D'où :
$m_s \cdot g - m_s \cdot a = \frac{m_p \cdot a}{2} - \frac{M_c}{r}$
On trouve :
application numérique : $a = 4,05$ m.s$^{-2}$