
LES LOIS DE NEWTON
1.1 Repérage d'un point $G$ d'un mobile - vecteur position
Pour étudier le mouvement d'un point $G$ d'un solide, on choisit deux repères reliés à un référentiel :
- Repère d'espace $R(O, \vec{i}, \vec{j}, \vec{k})$.
- Repère de temps : un chronomètre dont l'origine des dates est $t = 0$ et d'unité la seconde (s).
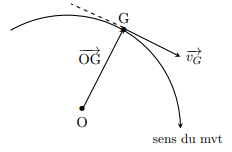
Le vecteur position $\vec{OG}$ est un vecteur dont l'origine est confondu avec celui du repère d'espace.
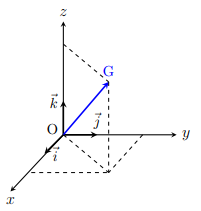
De norme (distance) : $OG = \sqrt{x^2 + y^2 + z^2}$ avec : $x$, $y$ et $z$ les coordonnées du point $G$ dans le repère orthonormé $R(O, \vec{i}, \vec{j}, \vec{k})$ et $\vec{i}$, $\vec{j}$ et $\vec{k}$ des vecteurs unitaires de norme égale à 1.
Lorsque $G$ est en mouvement, les coordonnées $x$, $y$ et $z$ varient au cours du temps et constituent des fonctions horaires $x(t)$, $y(t)$ et $z(t)$.
1.2 Trajectoire
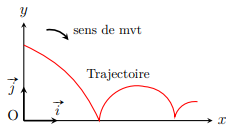
La trajectoire d'un point mobile $G$ dans un repère donné est une ligne formée par l'ensemble de positions occupées par $G$ lors de son mouvement.
La trajectoire du point $G$ est orientée par le sens de mouvement du mobile.
1.3 Vecteur vitesse
1.3.1 Vitesse moyenne
la vitesse moyenne $V_m$ d'un mobile entre deux instants $t$ et $t'$ est :
Avec $GG'$ la distance parcourue pendant la durée $\Delta t = t' - t$
La vitesse moyenne est exprimée dans le (S.I) en m.s$^{-1}$
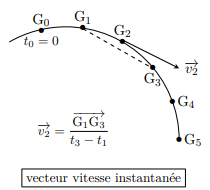
1.3.2 Vecteur vitesse instantanée
Dans un repère donné, le vecteur vitesse instantanée d'un mobile est la dérivée par rapport au temps du vecteur position $\vec{OG}$ :
dont les caractéristiques sont :
- Direction : tangent à la trajectoire au point $G$ à l'instant $t$.
- Sens : sens du mouvement.
- Norme $||\vec{v}||$ : valeur de la vitesse à l'instant $t$ en (m.s$^{-1}$).
L'expression de $\vec{v}$ dans le repère $R(O, \vec{i}, \vec{j}, \vec{k})$ est : $\vec{v} = v_x \cdot \vec{i} + v_y \cdot \vec{j} + v_z \cdot \vec{k}$
et de norme : $v = \sqrt{v_x^2 + v_y^2 + v_z^2} = \sqrt{\dot{x}^2 + \dot{y}^2 + \dot{z}^2}$ avec : $v_x = \frac{dx}{dt} = \dot{x}$, $v_y = \frac{dy}{dt} = \dot{y}$ et $v_z = \frac{dz}{dt} = \dot{z}$
2.1 Notion d'accélération
On considère une voiture qui se déplace le long d'un trajet rectiligne, et passe d'une vitesse de $V_1 = 25$ m.s$^{-1}$ à une vitesse $V_2 = 30$ m.s$^{-1}$ en 2 s. On dit que la vitesse de la voiture a augmenté. cette augmentation de la vitesse est appelée accélération.
- Si la vitesse augmente, on l'appelle accélération.
- Si la vitesse diminue, on l'appelle décélération.
⋆ Le changement de direction de la vitesse est aussi une accélération.
2.2 Accélération moyenne
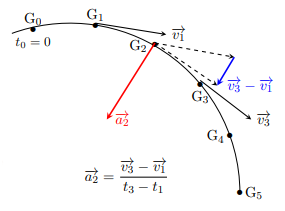
On considère le déplacement d'un mobile de la position $G_0$ à l'instant $t_0$ et de vitesse $v_0$, vers la position $G$ à l'instant $t$ et de vitesse $v$. L'accélération moyenne de ce mobile entre les instants $t$ et $t_0$ s'écrit :
2.3 Vecteur accélération instantanée
Si le vecteur vitesse d'un mobile à l'instant $t$ est $\vec{v}$, et son vecteur vitesse à l'instant $t'$ est $\vec{v'}$. Le vecteur accélération $\vec{a}$ à l'instant $t$ est défini par :
On écrit aussi : $\vec{a} = \frac{d\vec{v}}{dt}$ ou $\vec{a} = \frac{d^2\vec{OG}}{dt^2}$
⋆ Le vecteur accélération représente la dérivée première du vecteur vitesse et la dérivée seconde du vecteur position.
Dans le repère $R(O, \vec{i}, \vec{j}, \vec{k})$, on exprime le vecteur accélération par :
avec : $a_x = \frac{dv_x}{dt} = \frac{d^2x}{dt^2}$ et la norme de $\vec{a}$ est : $a = \sqrt{\ddot{x}^2 + \ddot{y}^2 + \ddot{z}^2}$
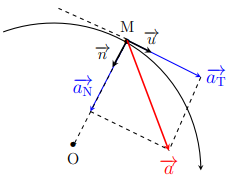
2.4 Vecteur d'accélération dans la base de Frenet
La base de Frenet est un repère orthonormé $(M, \vec{u}, \vec{n})$ tel que son origine est confondu avec la position du mobile et $\vec{u}$ vecteur unitaire tangent à la trajectoire et orienté selon le sens de mouvement, et $\vec{n}$ est un vecteur unitaire normale à $\vec{u}$ et orienté vers la concavité de la trajectoire.
On exprime le vecteur accélération dans la base de Frenet par :
et de norme $a = \sqrt{a_T^2 + a_N^2}$ tel que :
- $a_T = \frac{dv}{dt}$ : accélération tangentielle.
- $a_N = \frac{v^2}{r}$ : accélération normale. tel que $r = OM$ est le rayon de courbure de la trajectoire
2.5 Mouvement accéléré, décéléré et uniforme
L'accélération et la décélération est une description de la variation de la vitesse (augmentation ou diminution). Pour cela, on étudie le signe de $\vec{v} \cdot \vec{a}$ tel que :
$\vec{v} \cdot \vec{a} = v \vec{u} \cdot (a_T \vec{u} + a_N \vec{n}) = v \cdot a_T$
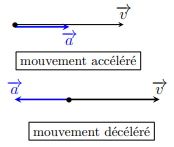
- $v \cdot a_T > 0$ : mouvement accéléré.
- $v \cdot a_T < 0$ : mouvement décéléré.
- $v \cdot a_T = 0$ : mouvement uniforme.
Rappel
- Un système isolé est un système qui subit aucune force extérieure.
- Un système pseudo-isolé est un système soumis à un ensemble de forces dont la somme vectorielle est nulle : $\sum \vec{F} = \vec{0}$
- Une force intérieure est exercée par un corps qui appartient au système étudié.
- Une force extérieure est exercée par un corps qui n'appartient pas au système étudié.
3.1 Première loi de Newton - Principe d'inertie
Dans un référentiel galiléen, lorsque la somme vectorielle des forces extérieures appliquées à un solide est nulle, le centre d'inertie $G$ est donc soit au repos, soit en mouvement rectiligne uniforme et inversement.
Un référentiel galiléen est un référentiel dont lequel le principe d'inertie est vérifié
Exemples
- Référentiel de Copernic : son origine est le centre du Soleil et ses axes sont dirigés vers 3 étoiles fixes lointaines.
- Référentiel géocentrique : son origine est le centre de la terre et ses axes sont dirigés vers 3 étoiles fixes.
- Référentiel terrestre : considéré galiléen pour une durée très brève (durée d'une expérience est très courte devant la période de rotation de la terre autour d'elle même).
En général, tout référentiel dont l'origine décrit un mouvement rectiligne uniforme est considéré galiléen.
3.2 Deuxième loi de Newton - Principe fondamentale de la dynamique
Dans un référentiel galiléen, la somme des forces extérieures appliquées à un solide est égale au produit de sa masse $m$ et de son vecteur accélération $\vec{a}_G$ de son centre d'inertie.
Remarques
- La deuxième loi de Newton reste valable tant que la vitesse du solide est très inférieure à la vitesse de la lumière c'est-à-dire $v \ll c$, car la masse du solide n'est plus constante, elle varie selon la loi d'Einstein $m = \frac{m_0}{\sqrt{1 - \frac{v^2}{c^2}}}$, $m_0$ étant la masse du solide au repos.
- La relation $m \cdot \frac{d\vec{v}}{dt} = \sum \vec{F}_{ext}$ indique que pour une masse importante, la variation de la vitesse est petite. On dit que la masse s'oppose à la variation de vitesse.
Comment appliquer la deuxième loi de Newton ?
- ⋆ Déterminer le système étudié.
- ⋆ Faire le bilan des forces appliquées et les représenter.
- ⋆ Écrire la relation vectorielle de la 2ème loi de Newton.
- ⋆ Choisir un référentiel convenable.
- ⋆ Projection de la 2ème loi de Newton sur les axes du référentiel.
- ⋆ Résoudre les équations.
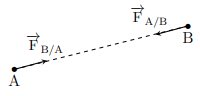
3.3 Troisième loi de Newton - Principe des interactions mutuelles
Lorsque deux corps $A$ et $B$ sont interaction mutuelle, la force $\vec{F}_{A/B}$ appliquée, par $A$, à $B$ et la force $\vec{F}_{B/A}$ appliquée, par $B$, à $A$ vérifient l'égalité
soit les deux corps sont au repos ou en mouvement.
Mouvement rectiligne : La trajectoire de $G$ est une droite parallèle par exemple l'axe $(O,x)$.
$\vec{OG} = x \cdot \vec{i}$ et $\vec{v} = v \cdot \vec{i} = \dot{x} \cdot \vec{i}$ et $\vec{a} = a \cdot \vec{i} = \dot{v} \cdot \vec{i} = \ddot{x} \cdot \vec{i}$
• Mouvement rectiligne uniforme : trajectoire rectiligne et la vitesse est constante : $v = \text{cte}$ et $a = 0$
• Équation horaire du mouvement : $x(t) = v \cdot t + x_0$ avec $x_0$ l'abscisse à $t = 0$.
• Mouvement rectiligne uniformément variable : trajectoire rectiligne et l'accélération est constante $a = \text{cte}$
• Équation horaire du mouvement : $x(t) = \frac{1}{2} \cdot a \cdot t^2 + v_0 \cdot t + x_0$ avec $v_0$ la vitesse initiale à $t = 0$
• Équation de la vitesse : $v(t) = a \cdot t + v_0$
Application 1 : Mouvement d'un solide le long d'un plan horizontal
On considère un corps solide $(S)$ de masse $m = 0,5$ kg sur un plan horizontal. Pour tirer le solide $(S)$, on applique une force horizontale d'intensité $F = 2$ N. On néglige les frottements.
- En appliquant la 2ème loi de Newton au solide $(S)$ pendant son mouvement, calculer $a_G$.
- Déduire la nature de mouvement du centre d'inertie $G$ du solide.
- Que se passe-t-il si on élimine la force $\vec{F}$ ?
- On suppose maintenant que le contact se fait avec frottement. cette force est équivalente à une force d'intensité $f = R_T = 0,5$ N.
- 4.1 Exprimer la nouvelle accélération $a_G$ et calculer sa valeur.
- 4.2 On définit le coefficient de frottement $k = \tan \varphi = \frac{R_T}{R_N}$, calculer sa valeur.
On donne : $g = 10$ m.s$^{-2}$
Correction
1. Calcul de l'accélération $a_G$ : système étudié { corps $(S)$ }
Bilan des forces :
- $\vec{P}$ : poids du corps.
- $\vec{F}$ : force de tirage.
- $\vec{R}$ : réaction du plan horizontal.
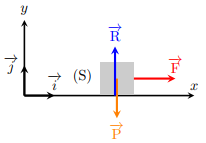
⋆ On applique, dans un référentiel galiléen, la 2ème loi de Newton : $m \vec{a}_G = \vec{P} + \vec{F} + \vec{R}$
• Projection de l'équation sur l'axe $(O,x)$ : $m \cdot a_x = P_x + F_x + R_x$ ①
• Projection de l'équation sur l'axe $(O,y)$ : $m \cdot a_y = P_y + F_y + R_y$ ②
② $\Rightarrow 0 = P + R + 0$ donc : $P = R = m \cdot g = 5$ N
① $\Rightarrow m \cdot a_x = 0 + F + 0$ et puisque le mouvement se fait selon l'axe $(O,x)$ donc : $a_x = a_G$. Ainsi :
$a_G = \frac{F}{m} = \frac{2}{0,5} = 4$ m.s$^{-2}$
2. Puisque $a_G = \text{cte}$ et la trajectoire est rectiligne, le mouvement est rectiligne uniformément variable.
3. Si la force $\vec{F}$ est éliminée au cours du mouvement $(F = 0)$, on aura $a_G = 0$ c'est à dire $v_G = \text{cte}$. Donc de mouvement le $G$ est uniforme.
4. Existence de frottements.
4.1 Expression de $a_G$ :
On applique la 2ème loi de Newton : $m \vec{a}_G = \vec{P} + \vec{F} + \vec{R}$
• Projection de l'équation sur l'axe $(O,x)$ : $m \cdot a_x = P_x + F_x + R_x$ ①
• Projection de l'équation sur l'axe $(O,y)$ : $m \cdot a_y = P_y + F_y + R_y$ ②
② $\Rightarrow 0 = P + R_N + 0$ donc : $P = R_N = m \cdot g = 5$ N
① $\Rightarrow m \cdot a_x = 0 + F - f$ et puisque le mouvement se fait selon l'axe $(O,x)$ donc : $a_x = a_G$. Ainsi :
$a_G = \frac{F - f}{m} = \frac{2 - 0,5}{0,5} = 3$ m.s$^{-2}$
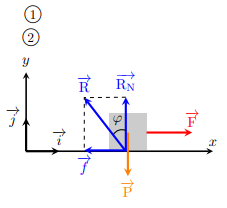
4.2 Coefficient de frottement $k$ :
On a : $k = \frac{R_T}{R_N} = \frac{f}{R_N}$
A.N : $k = \frac{0,5}{5} = 0,1$
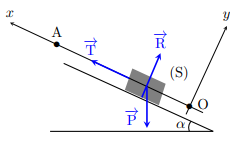
Application 2 : Mouvement d'un solide le long d'un plan incliné
On considère un solide $(S)$ de masse $m = 200$ g pouvant se déplacer suivant un plan incliné d'un angle $\alpha = 30°$ par rapport à l'horizontal.
On applique, via un fil inextensible, de masse négligeable, une force constante $\vec{T}$ pour tirer $(S)$ vers le haut. Ce dernier glisse depuis le point $O$, sans frottement et sans vitesse initiale. on considère $t = 0$ à la position $O$.
Le solide $(S)$ se déplace de $O$ vers $A$ à une accélération constante $a_G = 1,2$ m.s$^{-2}$ et arrive en $A$ avec une vitesse $v_A = 1,7$ m.s$^{-1}$.
- Déterminer, en justifiant, la nature du mouvement de $(S)$ puis écrire l'équation horaire du mouvement.
- Calculer $x_G$ du solide au passage par le point $A$.
- En appliquant la 2ème loi de Newton à $(S)$, calculer l'intensité $T$ de la tension du fil.
Correction
1. Le mouvement du corps $(S)$ est rectiligne uniformément variable car il se déplace selon l'axe $(O,x)$ à accélération constante.
L'équation horaire du mouvement de $(S)$ s'écrit : $x_G(t) = \frac{1}{2} \cdot a \cdot t^2 + v_0 \cdot t + x_0$ telle que :
- $v_0$ : vitesse de $G$ à l'instant $t = 0$, elle est nulle dans ce cas.
- $x_0$ : abscisse de $G$ à l'instant $t = 0$, il est nul dans ce cas.
Donc : $x_G(t) = \frac{1}{2} \cdot a \cdot t^2 \Rightarrow a_G = 0,6 \cdot t^2$
2. Calcul de $x_G$ :
On dérive l'équation horaire : $v(t) = \frac{dx}{dt} = \frac{d}{dt}\left(\frac{1}{2} \cdot a \cdot t^2\right) \Rightarrow v(t) = a \cdot t \Rightarrow v_A = a \cdot t_A$
Donc : $t_A = \frac{v_A}{a}$, on remplace dans l'équation horaire : $x_{GA} = \frac{1}{2} \cdot a \cdot \left(\frac{v_A}{a}\right)^2 = \frac{v_A^2}{2a}$
A.N : $x_{GA} = 1,2$ m
3. Intensité $T$ de la tension du fil :
Dans un référentiel galiléen, on applique la 2ème loi de Newton à $(S)$ qui est soumis à :
- $\vec{P}$ : poids du corps.
- $\vec{T}$ : tension du fil.
- $\vec{R}$ : réaction du plan incliné.
On écrit : $m \vec{a}_G = \vec{P} + \vec{T} + \vec{R}$, on projette l'équation sur l'axe $(O,x)$ : $m \cdot a_x = P_x + T_x + R_x$
$-P \cdot \sin \alpha + T + 0 = m \cdot a$ avec : $a_x = a$ puisque le mouvement se fait suivant l'axe $(O,x)$
$T = m(a + g \cdot \sin \alpha)$ A.N : $T = 12$ N