
LES ASPECTS ÉNERGÉTIQUES
1.1 Travail d'une force constante
Le travail $W$ d'une force constante $\vec{F}$, dont le point d'application se déplace du point $A$ vers le point $B$, est défini par la relation :
tel que :
- Le vecteur $\vec{AB}$ représente le vecteur de déplacement de longueur $AB$ du point d'application de la force exprimée en mètre (m).
- $\alpha$ est l'angle entre $\vec{AB}$ et $\vec{F}$, $\alpha = (\vec{AB}; \vec{F})$, en (rad).
- $W(\vec{F})$ le travail de la force $\vec{F}$, en (J)
Remarque : Cette expression est valable uniquement dans le cas d'une force constante.
1.2 Travail d'une force variable
Si la force n'est pas constante, l'expression précédente n'est plus valable. Pour cela on décompose la trajectoire du point d'application de la force en segment élémentaire $\vec{\delta\ell}$ appelé vecteur déplacement élémentaire. Sur chaque déplacement élémentaire on peut considérer que la force est constante et on applique la relation précédente, en considérant le travail élémentaire :
Le travail globale lors du déplacement $AB$ tel que $\vec{AB} = \sum_A^B \vec{F} \cdot \vec{\delta\ell}$ est :
Remarque : Si le déplacement $\vec{\delta\ell}$ est infinitésimale, on remplace $\sum$ par $\int$ ainsi que $\vec{\delta\ell}$ par $\vec{dl}$ dans ces conditions on écrit :
1.3 Travail de la force exercée sur l'extrémité d'un ressort
La force élastique $\vec{T}$ est une force qui varie avec l'état d'étirement du ressort $k$. Ce n'est donc pas une force constante au cours du déplacement, et pour calculer le travail de cette force il faut calculer le travail élémentaire de cette force pour un déplacement infiniment petit sur lequel nous considérerons que la force est constante. Pour cela, on utilise deux méthodes :
* Méthode analytique
Calculons le travail de $\vec{F}$ lors de déplacement du point d'application du $A$ vers $B$ (Voir figure).
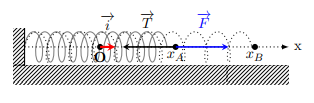
On sait que : $\vec{T} = -kx \vec{i}$, et on a : $\vec{F} = -\vec{T}$
Donc : $\vec{T} = -kx \vec{i}$ et $\vec{dl} = dx \vec{i}$
D'où : $W(\vec{F}) = \int_A^B \vec{F} \cdot \vec{dl} = \int_A^B kx \vec{i} \cdot dx \vec{i}$
c-à-d : $W(\vec{F}) = \int_A^B (kxdx)(\vec{i} \cdot \vec{i}) = \int_A^B kxdx = \left[\frac{1}{2}k \cdot x^2\right]_A^B$
Finalement :
* Méthode géométrique
D'après la définition de l'intégral, le travail de $\vec{F}$ correspond à l'aire du rectangle jaune, qui est limité par la courbe $F = kx$ et l'axe des abscisse tel que $x_A \leq x \leq x_B$.
Donc : $W(\vec{F}) =$ l'aire de grand triangle $-$ l'aire de petit triangle.
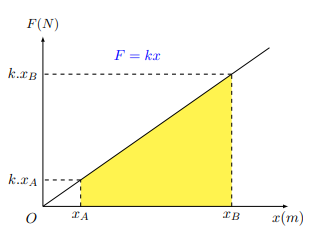
Finalement on trouve le même résultat : $W(\vec{F}) = \frac{1}{2}k(x_B^2 - x_A^2)$
2.1 Énergie cinétique
Un corps solide indéformable, de masse $m$ et de vitesse $v$ par rapport à un repère donné possède une énergie cinétique $E_c$ (J) de translation tel que :
pour un pendule élastique on a : $E_c = \frac{1}{2}mv^2$ avec $x(t) = X_m \cos\left(\frac{2\pi}{T_0}t + \varphi\right)$ et $\dot{x}(t) = -X_m \frac{2\pi}{T_0} \sin\left(\frac{2\pi}{T_0}t + \varphi\right)$
2.2 L'énergie potentielle élastique du système (solide + ressort)
L'énergie potentielle élastique $E_{P,e}$ d'un système (solide + ressort) horizontal est l'énergie qui possède ce système lorsque le ressort est déformé :
tel que :
- $E_{P,e}$ : L'énergie potentielle élastique du système en (J).
- $k$ : Constante de raideur d'un ressort (N.m$^{-1}$).
- $x$ : l'allongement du ressort en (m).
- $C$ : est une constante qui dépend du choix de l'état de référence de l'énergie potentielle élastique.
Dans le cas où on choisit $E_{P,e}$ nulle pour $x = 0$ alors : $E_{P,e} = \frac{1}{2}kx^2$ avec $x(t) = X_m \cos\left(\frac{2\pi}{T_0}t + \varphi\right)$
2.3 Énergie mécanique du système
Par définition ; dans un repère donné, l'énergie mécanique d'un système est la somme de son énergie cinétique et son énergie potentielle.
Lorsque $E_{P,e}$ est nulle pour $x = 0$ alors : $E_m = \frac{1}{2}m\dot{x}^2 + \frac{1}{2}kx^2$
2.4 Résultats d'expression d'énergie mécanique du pendule élastique horizontal
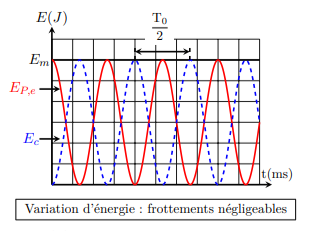
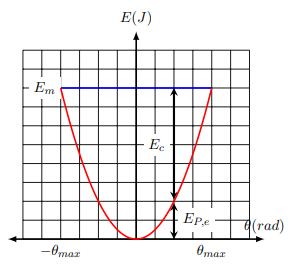
+ Cas des frottements négligeables :
Dans le cas des frottements négligeables, L'amplitude des oscillations est constante $X_m$, le régime est périodique de période propre $T_0$. Donc l'énergie mécanique $E_m$ du système se conserve.
On a : $E_m = \frac{1}{2}m\dot{x}^2 + \frac{1}{2}kx^2 \Rightarrow$
$\begin{cases} x = 0 & E_m = \frac{1}{2}mv_m^2 \\ x = X_m & E_m = \frac{1}{2}kx_m^2 \end{cases}$
$\Rightarrow E_m = \frac{1}{2}mv_m^2 = \frac{1}{2}kx_m^2 \Rightarrow v_m = x_m \sqrt{\frac{k}{m}}$
D'autre part : puisque $E_m = \text{Cte} \Rightarrow \frac{dE_m}{dt} = 0$
c'est à dire : $\frac{d}{dt}\left(\frac{1}{2}m\dot{x}^2 + \frac{1}{2}kx^2\right) = 0 \Rightarrow m\dot{x}\ddot{x} + kx\dot{x} = 0$
C'est l'équation différentielle du mouvement.
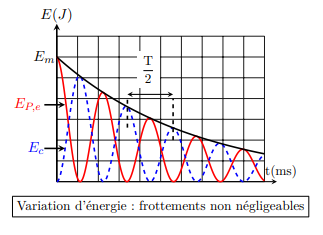
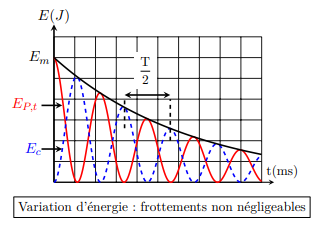
+ Cas des frottements non négligeables :
Dans ce cas l'amplitude des oscillations décroît avec le temps, le régime est pseudo-périodique de période $T$. L'énergie mécanique du système diminue au cours du temps. Elle est dissipée par transfert thermique.
3.1 Énergie cinétique
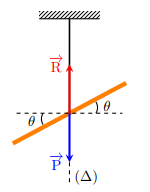
On considère un pendule de torsion formé d'un fil métallique léger auquel est fixé une tige dense. Soit $J_\Delta$ le moment d'inertie de la tige par rapport à l'axe de rotation matérialisé par le fil métallique et $\dot{\theta}$ est la vitesse angulaire de la tige à instant $t$. On définit l'énergie cinétique du système qu'est en rotation autour de $\Delta$, à cet instant $t$ par l'expression suivante :
avec : $\dot{\theta}(t) = -\theta_m \frac{2\pi}{T_0} \sin\left(\frac{2\pi}{T_0}t + \varphi\right)$
3.2 L'énergie potentielle de torsion
On exprime le travail d'un couple de force par : $\delta W = M_T \cdot \delta\theta$
avec : $M_T = -C\theta$ donc : $\delta W = -C\theta \cdot \delta\theta$
$\Rightarrow W_{\theta_1 \rightarrow \theta_2} = \int_{\theta_1}^{\theta_2} -C\theta d\theta = \left[\frac{1}{2}C \cdot \theta^2\right]_{\theta_1}^{\theta_2} = \frac{1}{2}C\theta_1^2 - \frac{1}{2}C\theta_2^2$
D'après le théorème de l'énergie cinétique :
$\Delta E_{c_{\theta_1 \rightarrow \theta_2}} = W(\vec{P}) + W(\vec{R}) + W(\vec{T}) = 0 + 0 + \frac{1}{2}C\theta_1^2 - \frac{1}{2}C\theta_2^2$
L'énergie potentielle de torsion d'un pendule de torsion est définie par la relation :
Avec $C$ la constante de la torsion du pendule, $\theta$ angle de torsion en rad et Cte une constante qui dépend du choix de l'état de référence fourni par les conditions initiales.
En général, on prend $E_{P,t} = 0$ pour $\theta = 0$ d'où $E_{P,t} = \frac{1}{2}C\theta^2$
3.3 Énergie mécanique du système
On définit l'énergie mécanique d'un pendule de torsion par la relation suivante :
Si Cte $= 0$, on trouve donc : $E_m = \frac{1}{2}J_\Delta \dot{\theta}^2 + \frac{1}{2}C\theta^2$
3.4 Résultats d'expression d'énergie mécanique du pendule élastique horizontal
+ Cas des frottements négligeables :
Dans le cas des frottements négligeables, L'amplitude des oscillations est constante $T_0$, le régime est périodique de période propre $T_0$. Donc l'énergie mécanique $E_m$ du système se conserve.
On a : $E_m = \frac{1}{2}J_\Delta \dot{\theta}^2 + \frac{1}{2}C\theta^2 \Rightarrow$
$\begin{cases} \theta = 0 & E_m = \frac{1}{2}J_\Delta \dot{\theta}_m^2 \\ \theta = \theta_m & E_m = \frac{1}{2}C\theta_m^2 \end{cases}$
$\Rightarrow E_m = \frac{1}{2}J_\Delta \dot{\theta}_m^2 = \frac{1}{2}C\theta_m^2 \Rightarrow \dot{\theta}_m = \theta_m \sqrt{\frac{C}{J_\Delta}}$
D'autre part : puisque $E_m = \text{Cte} \Rightarrow \frac{dE_m}{dt} = 0$
c'est à dire : $\frac{d}{dt}\left(\frac{1}{2}J_\Delta \dot{\theta}^2 + \frac{1}{2}C\theta^2\right) = 0 \Rightarrow J_\Delta \dot{\theta}\ddot{\theta} + C\theta\dot{\theta} = 0$
C'est l'équation différentielle du mouvement.
+ Cas des frottements non négligeables :
Dans ce cas l'amplitude des oscillations décroît avec le temps, le régime est pseudo-périodique de période $T$. L'énergie mécanique du système diminue au cours du temps. Elle est dissipée par transfert thermique.
4.1 Énergie cinétique
L'énergie cinétique d'un pendule pesant effectuant un mouvement oscillatoire est définie par la relation :
4.2 L'énergie potentielle d'un pendule pesant
L'énergie potentielle de pesanteur d'un pendule pesant est donnée par la relation suivante :
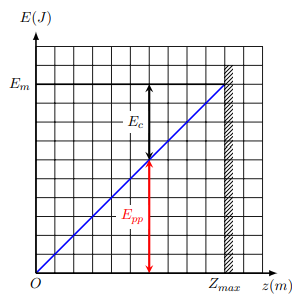
Avec $m$ la masse du système en (kg), $g$ intensité de pesanteur en (m.s$^{-2}$), $z$ la côte du centre d'inertie $G$ du système sur l'axe $(O; \vec{k})$ d'un repère orthonormé $R(O, \vec{i}, \vec{j}, \vec{k})$ orienté vers le haut.
Cte une constante qui dépend de l'état de référence choisi où l'énergie potentielle est nulle (En général on choisit $E_{PP} = 0$ pour $z = 0$ donc Cte $= 0$).
Dans la figure ci dessous :
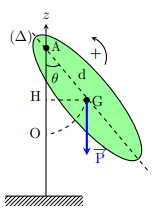
On choisit $E_{PP} = 0$ pour $z = 0$ donc Cte $= 0$
$\Rightarrow E_{PP} = mgz = mg(AO - AH) = mgd(1 - \cos \theta)$
4.3 Énergie mécanique du système oscillant
L'expression de l'énergie mécanique d'un pendule pesant dans un référentiel terrestre est :
Si Cte $= 0$ on trouve donc : $E_m = \frac{1}{2}J_\Delta \dot{\theta}^2 + mgH$.
4.4 Résultats d'expression d'énergie mécanique d'un pendule pesant
+ Cas des frottements négligeables :
Dans le cas des frottements négligeables, L'amplitude des oscillations est constante $T_0$, le régime est périodique de période propre $T_0$. Donc l'énergie mécanique $E_m$ du système se conserve.
On a : $E_m = \text{Cte} \Rightarrow \frac{dE_m}{dt} = 0$
$\Rightarrow \frac{d}{dt}\left(\frac{1}{2}J_\Delta \dot{\theta}^2 + mgz\right) = 0 \Rightarrow \frac{d}{dt}\left(\frac{1}{2}J_\Delta \dot{\theta}^2 + mgd(1 - \cos \theta)\right) = 0$
C'est à dire : $J_\Delta \dot{\theta}\ddot{\theta} + mgd \sin \theta \dot{\theta} = 0$
Pour des faibles angles, on prend $\sin \theta \approx \theta$, donc :
C'est l'équation différentielle du mouvement.
+ Cas des frottements non négligeables :
Dans ce cas l'amplitude des oscillations décroît avec le temps, le régime est pseudo-périodique de période $T$. L'énergie mécanique du système diminue au cours du temps. Elle est dissipée par transfert thermique.
Remarque : Pour des faibles élongations, on peut considérer en première approximation que $1 - \cos \theta \approx \frac{\theta^2}{2}$ c'est à dire : $E_{PP} = \frac{1}{2}mgd\theta^2$.