
SYSTÈMES MÉCANIQUES OSCILLANTS
On dit qu'un système forme un oscillateur mécanique, s'il réalise un mouvement oscillatoire c'est-à-dire un mouvement d'aller retour autour de sa position d'équilibre stable.
1.1 Exemples d'oscillateurs mécaniques
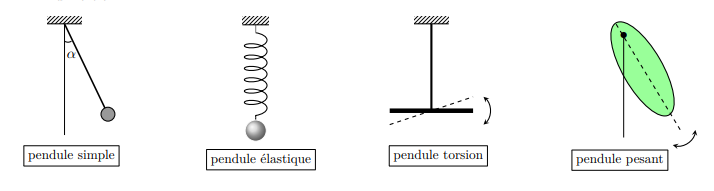
- Pendule simple : formé d'un solide ponctuel de masse $m$ suspendu par un fil inextensible.
- Pendule élastique : formé d'un solide de masse $m$ relié à un ressort de spires non jointives et de raideur $k$.
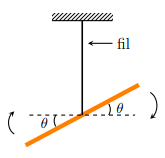
- Pendule de torsion : formé d'un fil d'acier susceptible à la torsion fixé par son extrémité haute, et porte une barre homogène suspendue depuis son centre d'inertie.
- Pendule pesant : tout corps pouvant osciller autour d'un axe horizontal $(\Delta)$ ne passant pas par son centre d'inertie.
1.2 Caractéristiques du mouvement d'oscillation
- ⋆ Position d'équilibre stable : Position à laquelle retourne l'oscillateur lorsqu'il est déplacé.
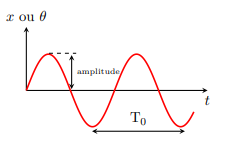
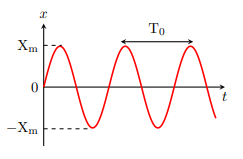
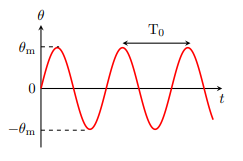
- ⋆ Amplitude de mouvement : Valeur maximale positive que peut prendre la grandeur caractérisant l'éloignement (ou déviation) du solide de sa position d'équilibre stable.
- ⋆ Période propre $T_0$ : Durée nécessaire pour réaliser une oscillation (un allée retour).
- ⋆ Fréquence propre $f_0$ : Nombre d'oscillations par seconde. $f_0 = \frac{1}{T_0}$
1.3 Amortissements des oscillations mécaniques
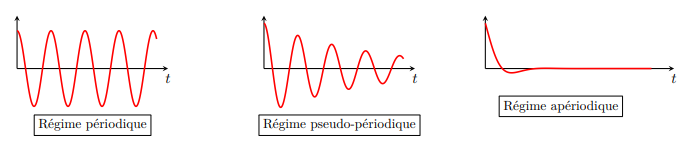
Lorsqu'un oscillateur mécanique est écarté de sa position d'équilibre stable. En le libérant, on remarque que l'amplitude des oscillations diminue jusqu'à ce que l'oscillateur s'arrête, l'amplitude devient nulle. On appelle ce phénomène amortissement.
Le phénomène d'amortissement se produit à cause des frottements, on distingue :
- Frottements visqueux : frottements dus au contact de l'oscillateur avec un fluide (liquide comme l'eau ou gaz comme l'air).
- Frottements solides : frottements dus au contact de l'oscillateur avec un solide.
Types d’oscillations
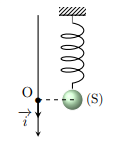
2.1 Pendule élastique
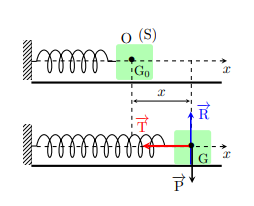
Système étudié : { Autoporteur (S) }
Bilan des forces :
- $\vec{P}$ : Poids.
- $\vec{R}$ : Réaction de la table à coussin d'air.
- $\vec{T}$ : Force de rappel liée à la tension du ressort $\vec{T} = -k \cdot x \cdot \vec{i}$
Dans un repère $R (O,x,y)$ relié à la terre et considéré galiléen, on applique la 2ème loi de Newton :
$m \cdot \vec{a} = \vec{P} + \vec{R} + \vec{T}$
On projette la relation sur l'axe $(O,x)$ : $m \cdot a_x = 0 + 0 - k \cdot x \Rightarrow a_x + \frac{k}{m} \cdot x = 0$
Et puisque $a_x = \frac{d^2x}{dt^2} = \ddot{x}$ l'équation devient :
Équation différentielle de mouvement
Avec $k$ : raideur du ressort.
⋆ Équation horaire du mouvement
La solution de l'équation différentielle s'écrit sous la forme :
représente l'équation horaire du mouvement telle que :
- $x(t)$ : élongation, c'est une grandeur algébrique, $-X_m \leq x(t) \leq X_m$, elle est exprimée en (m).
- $X_m$ : amplitude du mouvement et valeur maximale de l'élongation exprimée en (m).
- $\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$ : phase propre à l'instant $t$ du mouvement.
- $T_0$ : période propre du mouvement, exprimée en (s).
- $\varphi$ : phase à l'origine à $t=0$, exprimée en (rad) et on choisit $-\pi \leq \varphi \leq \pi$
⋆ Expression de la période propre $T_0$
On a : $x(t) = X_m \cdot \cos\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
$\Rightarrow \dot{x} = -\frac{2\pi}{T_0} \cdot X_m \cdot \sin\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
$\Rightarrow \ddot{x} = -X_m \cdot \left(\frac{2\pi}{T_0}\right)^2 \cdot \cos\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
Donc : $\ddot{x} = -\left(\frac{2\pi}{T_0}\right)^2 \cdot x$, on remplace $\ddot{x}$ dans l'équation différentielle : $-\left(\frac{2\pi}{T_0}\right)^2 + \frac{k}{m} = 0$
Alors :
et la fréquence propre :
Application 1
On considère un pendule élastique verticale formé d'un ressort de spires non jointives et de raideur $k = 20$ N.m$^{-1}$ et un solide (S) de masse $m = 200$ g. On écarte le solide verticalement vers le bas d'une distance de 3 cm, puis on le libère sans vitesse initiale.
On considère un repère $(O, \vec{i})$ vertical dirigé vers le bas, son origine $O$ est confondu avec le centre d'inertie du solide (S) à l'équilibre.
à l'instant $t = 0$, le solide (S) passe par sa position d'équilibre stable $G_0$ dans le sens positif.
- Exprimer l'allongement du ressort $\Delta \ell_0$ à l'équilibre.
- Écrire l'équation différentielle du mouvement.
- Écrire l'équation horaire du mouvement.
- Calculer la période propre et la fréquence propre du mouvement de l'oscillateur.
On donne : $g = 10$ N.kg$^{-1}$
2.2 Pendule de torsion
2.2.1 Moment de couple de torsion
Le couple de torsion résiste à la torsion du fil, il essaye de rendre le fil à son état initial. On l'appelle couple de rappel.
Le moment du couple de rappel (couple de rappel) est indépendant de l'axe de rotation, et exprimé par la relation :
- $M_C$ : Moment du couple de torsion (N.m)
- $C$ : Constante de torsion (N.m.rad$^{-1}$)
- $\theta$ : Angle de torsion (rad)
2.2.2 Équation différentielle
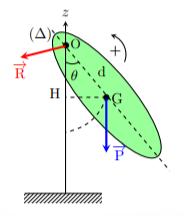
Dans un référentiel lié à la terre, on étudie le mouvement de la barre de moment d'inertie $J_\Delta$ par rapport à l'axe $(\Delta)$.
La position de la barre est repérée, à chaque instant, par l'abscisse angulaire $\theta$ mesurée à partir de la position de référence.
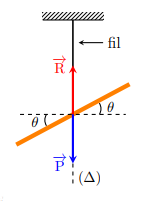
Bilan des forces : La barre est soumise à :
- $\vec{P}$ : son poids.
- $\vec{R}$ : réaction du fil.
- $M_C$ : couple de torsion.
On applique le principe fondamentale de la dynamique (Mouvement de rotation) :
$J_\Delta \cdot \ddot{\theta} = \Sigma M(\vec{F}) \Rightarrow J_\Delta \cdot \ddot{\theta} = M(\vec{P}) + M(\vec{R}) + M_C$
Puisque la direction de $\vec{P}$ et $\vec{R}$ est confondue avec l'axe de rotation $(\Delta)$, le moment de ces forces est alors nul :
$J_\Delta \cdot \ddot{\theta} = -C \cdot \theta \Rightarrow$
Éq. différentielle du mvt de la barre
2.2.3 Équation horaire du mouvement
La solution de l'équation différentielle du mouvement s'écrit :
représente l'équation horaire du mouvement telle que :
- $\theta(t)$ : abscisse angulaire, c'est une grandeur algébrique, $-\theta_m \leq \theta(t) \leq \theta_m$, il est exprimé en (rad).
- $\theta_m$ : amplitude du mouvement et valeur maximale de l'abscisse angulaire exprimée en (rad).
- $\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$ : phase propre à l'instant $t$ du mouvement.
- $T_0$ : période propre du mouvement, exprimée en (s).
- $\varphi$ : phase à l'origine à $t=0$, exprimée en (rad) et on choisit $-\pi \leq \varphi \leq \pi$
2.2.4 Période propre $T_0$ et fréquence propre $f_0$
On a : $\theta(t) = \theta_m \cdot \cos\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
$\Rightarrow \dot{\theta} = -\frac{2\pi}{T_0} \cdot \theta_m \cdot \sin\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
$\Rightarrow \ddot{\theta} = -\theta_m \cdot \left(\frac{2\pi}{T_0}\right)^2 \cdot \cos\left(\frac{2\pi}{T_0} \cdot t + \varphi\right)$
Donc : $\ddot{\theta} = -\left(\frac{2\pi}{T_0}\right)^2 \cdot \theta$, on remplace $\ddot{\theta}$ dans l'équation différentielle : $-\left(\frac{2\pi}{T_0}\right)^2 + \frac{C}{J_\Delta} = 0$
Alors :
et la fréquence propre :
On définit également la pulsation propre : $\omega_0 = 2\pi \cdot f_0 = \sqrt{\frac{C}{J_\Delta}}$
Application 2
On réalise un pendule, en suspendant un disque, de moment d'inertie par rapport à l'axe $(\Delta)$ est $J_\Delta = 5 \cdot 10^3$ kg.m$^2$, par un fil métallique.

Les axes du fil et du disque sont confondus. On fait tourner le disque autour de son axe $(\Delta)$, puis on le libère sans vitesse initiale à $t = 0$.
L'équation horaire de mouvement du disque : $\theta(t) = \frac{5\pi}{100} \cdot \cos(2,38\pi \cdot t)$.
- Déterminer l'amplitude et la fréquence du mouvement.
- Calculer $C$ la constante de torsion du fil.
2.3 Pendule pesant
2.3.1 Équation différentielle du mouvement
Un pendule pesant est un corps solide (S) de masse $m$ mobile autour d'un axe $(\Delta)$.
Dans un référentiel lié à la terre, on étudie le mouvement du pendule de moment d'inertie $J_\Delta$ par rapport à l'axe $(\Delta)$.
On repère la position de (S), à chaque instant, par l'abscisse angulaire $\theta$ formé par $OG$ et l'axe $(O,z)$.
Bilan des forces :
- $\vec{P}$ : son poids.
- $\vec{R}$ : réaction de l'axe $(\Delta)$.
On applique la relation fondamentale de la dynamique au solide (S) dans le cas de la rotation autour d'un axe fixe : $M(\vec{P}) + M(\vec{R}) = J_\Delta \cdot \ddot{\theta}$
Et puisque la direction de $\vec{R}$ est en intersection avec l'axe $(\Delta) \Rightarrow M(\vec{R}) = 0$
On pose : $d = OG$, on obtient : $M(\vec{P}) = -P \cdot HG = -mg \cdot d \cdot \sin \theta$
Donc : $-mg \cdot d \cdot \sin \theta = J_\Delta \cdot \ddot{\theta} \Rightarrow$
Éq différentielle de mvt du pendule
Dans le cas des petites oscillations $\theta \leq 15°$ c-à-d $\theta \leq 0,26$ rad, on peut écrire donc : $\sin \theta \approx \theta$, l'équation différentielle devient :
2.3.2 Équation horaire du mouvement
La solution de l'équation différentielle du mouvement s'écrit :
représente l'équation horaire du mouvement.
2.3.3 Période propre $T_0$ du mouvement
On exprime la pulsation propre par : $\omega_0 = \sqrt{\frac{mgd}{J_\Delta}}$
Et puisque $\omega_0 = \frac{2\pi}{T_0}$, la période propre s'écrit :
2.4 Pendule simple
2.4.1 Équation différentielle du mouvement
Un pendule simple est un cas particulier du pendule pesant.
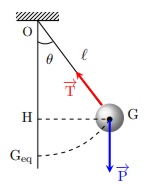
On réalise un pendule simple en suspendant une petite bille de grande densité par un fil inextensible de masse négligeable. Le moment d'inertie du pendule simple est $J_\Delta = m \cdot \ell^2$, tel que $m$ est la masse de la bille et $\ell$ la longueur du pendule $\ell = OG$.
Dans le cas de petites oscillations, on obtient : $\ddot{\theta} + \frac{mg\ell}{J_\Delta} \cdot \theta = 0$
Et puisque $J_\Delta = m \cdot \ell^2$, on aura :
Éq différentielle de mvt du pendule simple
2.4.2 Équation horaire du mouvement
Par analogie avec le pendule pesant, l'équation horaire du pendule simple s'écrit :
2.4.3 Période propre $T_0$ du mouvement
On exprime la pulsation propre par : $\omega_0 = \sqrt{\frac{g}{\ell}}$
Et puisque $\omega_0 = \frac{2\pi}{T_0}$, la période propre s'écrit :
Analyse dimensionnelle de la période $T_0$
$[T_0] = \left[2\pi \sqrt{\frac{\ell}{g}}\right] = \sqrt{\frac{L}{L \cdot T^{-2}}} = \sqrt{T^2} = T$, La période $T_0$ a une dimension de temps, elle est exprimée alors en seconde.
Application 3
Pour déterminer l'intensité de pesanteur $g$ avec précision, on réalise un pendule simple à l'aide d'une bille de Plomb, fil inextensible et un chronomètre.
- Faire un schéma du pendule, et y représenter les forces appliquées à la bille.
- Trouver l'équation différentielle de mouvement du pendule. Le moment d'inertie du pendule par rapport à l'axe $(\Delta)$ est $J_\Delta = m\ell^2$. On admet que $\sin \theta \approx \theta$
- La solution de l'équation différentielle s'écrit : $\theta(t) = \theta_m \cdot \cos\left(\frac{2\pi}{T} \cdot t + \varphi\right)$, montrer que $T = 2\pi \sqrt{\frac{\ell}{g}}$
- On mesure la durée de 50 périodes du pendule, on trouve 122,9 s pour une longueur de fil $\ell = 1,5$ m.
- 4.1 Calculer la valeur de $g$.
- 4.2 Calculer la période des oscillations de ce pendule à la surface de la lune sachant que l'intensité de pesanteur à la surface est $g' = 1,63$ m.s$^{-2}$
3.1 Oscillations forcées
Les oscillations mécaniques sont amorties à cause des frottements. Pour entretenir les oscillations, c'est à dire compenser l'énergie perdue par frottement, on place un appareil qui délivre l'énergie nécessaire pour que les oscillations soient non amorties. Cet appareil est un système de mouvement oscillatoire, appelé Excitateur, qui impose sa période $T_e$ au système oscillant appelé résonateur dont les oscillations deviennent forcées.
3.2 Résonance mécanique
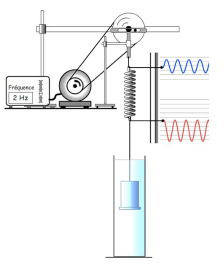
Le montage ci-contre représente un pendule élastique (résonateur) de fréquence $f_0$ et un moteur (excitateur) de fréquence $f_e$.
On relie l'oscillateur mécanique au moteur qui lui délivre l'énergie nécessaire pour l'entretien d'oscillations. L'oscillateur est forcé d'osciller à la fréquence imposée par le moteur. On fait varier la fréquence du moteur, et on constate que l'amplitude des oscillations devient maximale lorsque la fréquence du moteur coïncide (égale) avec la fréquence de l'excitateur $f_e = f_0$. On dit que le système est en résonance.
La période propre du résonateur est $T_0 = 2\pi \sqrt{\frac{m}{k}}$ et la fréquence propre $f_0 = \frac{1}{T_0}$.
Remarques
- Plus l'amortissement est faible, plus le phénomène de résonance est important, l'amplitude des oscillations est maximale (résonance aigüe).
- Plus l'amortissement est important, plus le phénomène de résonance est faible, l'amplitude des oscillations à la résonance est faible (résonance floue).