
CHUTE VERTICALE D’UN SOLIDE
1.1 Définition
Dans le champ de pesanteur, au voisinage de la terre, les corps son soumis à une force de pesanteur exercée par
la terre qui s'appelle Poids du corps, tel que :
$\vec{P} = m \cdot \vec{g}$
- $\vec{P}$ : Poids du corps (N)
- $g$ : Intensité du champ de pesanteur (N.Kg$^{-1}$) ou (m.s$^{-2}$)
- $m$ : la masse du corps (Kg)
2.1 Poussée d'Archimède
Tout corps immergé totalement ou partiellement dans un fluide est soumis à une force exercée par ce fluide qui
s'appelle la poussée d'Archimède. ses caractéristiques sont :
- Sens : Orienté vers le haut
- Direction : Verticale.
- Intensité : Égale au poids du liquide déplacée, tel que : $F_A = m_f \cdot g$ avec $m_f = \rho_f \cdot V$
Expression de la poussée d'Archimède :
$\vec{F_A} = -\rho_f \cdot V \cdot \vec{g}$
- $\rho_f$ : la masse volumique du fluide (Kg.m$^{-3}$)
- $g$ : Intensité du champ de pesanteur (N.Kg$^{-1}$) ou (m.s$^{-2}$)
- $V$ : volume du liquide déplacé (m$^3$)
- $F_A$ : l'intensité de la poussée d'Archimède (N)
2.2 Force de frottement fluide
Les forces de frottements exercées par un fluide sur un corps immergé dedans sont équivalente à une force unique
appelée force de frottement fluide, et ses caractéristiques sont :
- Direction : la direction de la vitesse $\vec{v}_G$.
- Sens : opposée de la vitesse $\vec{v}_G$
- Intensité : $f = kv^n$
Si la vitesse est faible, on prend $n = 1$ et la force de frottement devient : $f = kv$
Si la vitesse est importante, on prend $n = 2$ et la force de frottement devient : $f = kv^2$
Expression de la force de frottement fluide :
$\vec{f} = -k \cdot \vec{v}^n$
- $k$ : Constante qui dépend de la viscosité de fluide.
- $v$ : Vitesse du corps (m.s$^{-1}$)
- $f$ : l'intensité de la force de frottement fluide (N)
3.1 Étude expérimentale
On peut évaluer la vitesse d'une bille tombant dans un fluide, suivant les étapes :
- Réaliser la chute, sans vitesse initiale, d'une bille d'acier dans un fluide.
- Enregistrer son mouvement et tracer l'évolution de la vitesse de la bille en fonction du temps.
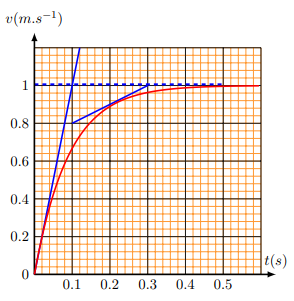
$\Rightarrow$ On enregistre le mouvement de la bille en utilisant logiciel (Regressi), et on obtient la courbe ci-dessous.
Questions :
- Décrire l'évolution de la vitesse de la bille.
- Comment le graphe $v(t)$ permet-il d'étudier l'évolution de l'accélération au cours du temps ? Décrire cette évolution.
- Déduire la vitesse limite $v_\ell$.
- Déterminer graphiquement $\tau$ le temps caractéristique du mouvement.
Réponses :
- Nous constatons que la vitesse augmente, puis se stabilise. la bille atteint une vitesse limite.
- L'accélération est la dérivée de la vitesse par rapport au temps.
A une date donnée, on trace la tangente à la courbe $v(t)$ : son coefficient directeur donne l'accélération à la date $t$. les coefficients directeurs diminuent jusqu'à s'annuler lorsque le régime permanent est atteint. - D'après la courbe la vitesse limite $v_\ell = 1$ m.s$^{-1}$.
- D'après la courbe $\tau = 0,1$ s.
3.2 Étude théorique
3.2.1 Équation différentielle vérifiée par la vitesse
Considérons une boule de masse $m$ complètement immergée dans un fluide.
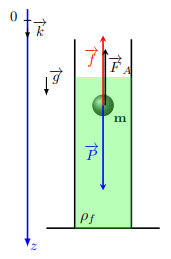
Le système étudié : (La boule).
Bilan des forces : la boule est soumise à l'action des forces suivantes :
- $\vec{P}$ : son poids
$\vec{P} = m \cdot g \cdot \vec{k}$ - $\vec{F_A}$ : la poussée d'Archimède
$\vec{F_A} = -\rho_f \cdot V \cdot g \cdot \vec{k}$ - $\vec{f}$ : force de frottement fluide
$\vec{f} = -k \cdot v^n \cdot \vec{k}$
Choix du repère : On considère le repère $(Oz)$ orienté vers le bas.
Application de la deuxième loi de Newton : $\sum \vec{F}_{ext} = m \cdot \vec{a}_G \Rightarrow$
$\vec{P} + \vec{F_A} + \vec{f} = m \cdot \vec{a}_G$ (H)
Projetant la relation (H) sur l'axe $(Oz)$ : $P - F_A - f = m \cdot a_G$
D'où $m \cdot g - m_f \cdot g - kv^n = m \cdot a_G$ Avec : $m_f = \rho_f \cdot V$
$\Rightarrow \frac{dv}{dt} = g\left(1 - \frac{m_f}{m}\right) - \frac{k}{m} \cdot v^n$ Équation différentielle vérifiée par la vitesse.
$\Rightarrow$ On pose : $A = g\left(1 - \frac{m_f}{m}\right)$ et $B = \frac{k}{m}$
Et on trouve finalement : $\frac{dv}{dt} = A - B \cdot v^n$
3.2.2 Détermination de la vitesse limite $V_\ell$
Lorsque le régime permanent est établi la vitesse de la bille devient constante, donc $v = v_\ell \Rightarrow \frac{dv}{dt} = 0$
C-à-d : $A - B \cdot v^n = 0$ donc l'expression de la vitesse limite devient : $v_\ell = \left(\frac{A}{B}\right)^{\frac{1}{n}}$
On remplace l'expression de $A$ et $B$ et on trouve : $v_\ell = \left(\frac{g}{k}(\rho - \rho_f)V\right)^{\frac{1}{n}}$ ou $v_\ell = \left(\frac{g}{k}(m - m_f)V\right)^{\frac{1}{n}}$
3.2.3 Détermination de l'accélération initiale $a_0$
Méthode 1 : à $t = 0$, on a $v = 0$ car la bille est lancée sans vitesse initiale, donc : $a_0 = \frac{dv(0)}{dt} = g \cdot \left(\frac{m - m_f}{m}\right)$
Méthode 2 : à $t = 0$, on a $\vec{f} = \vec{0}$ (la bille au repos), donc $k \cdot v^n = 0$ d'où : $a_0 = g \cdot \left(\frac{m - m_f}{m}\right)$
Remarque :
Graphiquement la valeur de l'accélération initiale est égale au coefficient directeur de la tangente à la courbe $v = f(t)$ à $t = 0$.
3.3 Solution de l'équation différentielle par la méthode d'Euler
La méthode d'Euler est une méthode itérative (c'est à dire qu'elle nécessite la répétition d'un même calcul), elle
permet de connaitre la vitesse de la bille à un instant donné.
Généralement, c'est la vitesse initiale $v_0$ qui est connue (instant $t_0$).
Cette méthode comporte deux étapes de calcul.
Première étape : On calcule l'accélération $a_0$ à la date $t_0$.
L'équation différentielle permet de connaitre l'accélération initiale $a_0$ à la date $t_0$ : $a_0 = A - B \cdot v_0^n$
Deuxième étape : On calcule la vitesse $v_1$ à la date ultérieur $t_1 = t_0 + \Delta t$
La durée $\Delta t$ est appelée le pas de calcul. $a_0 = \frac{\Delta v}{\Delta t} = \frac{v_1 - v_0}{\Delta t}$, soit $v_1 = v_0 + a_0 \Delta t$
On recommence ces deux étapes de calculs (Tableau).
- On calcule l'accélération $a_1$ à la date $t_1$ : $a_1 = A - B \cdot v_1^n$
- On calcule ensuite la vitesse $v_2$ à la date $t_2$ : $v_2 = v_1 + a_1 \Delta t$
- On recommence en calculant $a_2 = A - B \cdot v_2^n$, puis $v_3$ ...
Ces étapes de calculs sont résumées dans le tableau ci-contre.
| Date | Vitesse | Accélération |
|---|---|---|
| $t_0 = 0$ | $v_0$ | $a_0 = A - B \cdot v_0^n$ |
| $t_1 = t_0 + \Delta t$ | $v_1 = v_0 + a_0 \Delta t$ | $a_1 = A - B \cdot v_1^n$ |
| $t_2 = t_1 + \Delta t$ | $v_2 = v_1 + a_1 \Delta t$ | $a_2 = A - B \cdot v_2^n$ |
| ... | ... | ... |
Remarque :
Le choix du pas du calcul a une grande importance dans la méthode d'Euler, car plus le pas de calcul est petit
plus les résultats théoriques sont proches des résultats expérimentaux.
On prend généralement pour pas de calcul : $\Delta t = \frac{\tau}{10}$ pour ne pas dépasser la vitesse limite de la bille.
4.1 Définition
Un corps est en chute libre s'il n'est soumis qu'à l'action de son poids.
Lorsque la trajectoire du corps en chute libre est rectiligne on dit que le corps est en chute libre verticale.
Remarque : Pratiquement on peut négliger l'action de l'air sur les corps solides denses et ayant une forme aérodynamique.
4.2 Étude de la chute libre d'un corps
Considérons une boule d'acier de masse $m$ en chute libre verticale.
Le système étudié : (La boule).
Bilan des forces : La boule en chute est soumise uniquement à l'action de son poids $\vec{P} = m \cdot g \cdot \vec{k}$
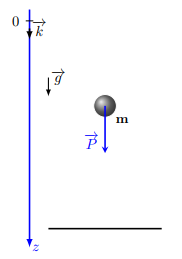
Choix du repère : On considère le repère $(Oz)$ orienté vers le bas.
Application de la deuxième loi de Newton : $\sum \vec{F}_{ext} = m \cdot \vec{a}_G \Rightarrow$
$\vec{P} = m \cdot \vec{a}_G$ (H)
Projetant la relation (H) sur l'axe $(Oz)$ : $P = m \cdot a_G$
D'où $m \cdot g = m \cdot a_G$ donc : $g = a_G$
Donc le mouvement de chute libre de la bille est rectiligne uniformément varié :
- Son accélération : $a_G = g$
- l'équation de la vitesse : $v_G = gt + v_0$
- l'équation horaire du mouvement : $z_G = \frac{1}{2}gt^2 + v_0t + z_0$